

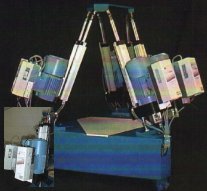
Handlings-Parallelroboter „Handlex“
Die Entwickler um Prof. Dr.-Ing. Pohl des Fachbereichs Mechatronik und Maschinenbau der FH Bochum machten es sich zur Aufgabe, einen sehr kostengünstigen Parallelroboter zu bauen. So kommen in den Bereichen Aktoren, Sensoren, Software und Steuerung nur solche Komponenten zum Einsatz, die auf dem Markt in großen Stückzahlen vorhanden sind. Der Parallelroboter kann in seinen statischen und dynamischen Fähigkeiten nicht mit den „teuren Brüdern“ mit Elektroservoantrieb oder mit Hydraulikaktoren konkurrieren. Aber aufgrund der kompakten Bauweise, der einfachen Installation sowie der hohen Tragkraft sind vielfältige Einsatzmöglichkeiten denkbar.
Das Mechatronikzentrum NRW der Fachhochschule Bochum demonstriert mit diesem Prototyp seine Kompetenz in der Entwicklung komplexer mechanischer Systeme.
Die Steuerung wurde mit Hilfe eines PCs unter WINDOWS 3.11 und der Simulations-Software WinFACT realisiert.

Über den Autor